Package
A ROS 2 package is a directory that organizes code, dependencies, and configurations needed to create and run ROS 2 applications.
For creating the package, follow the official documentation of ROS 2:
ROS 2 Package Creation Guide📷 C++ Package
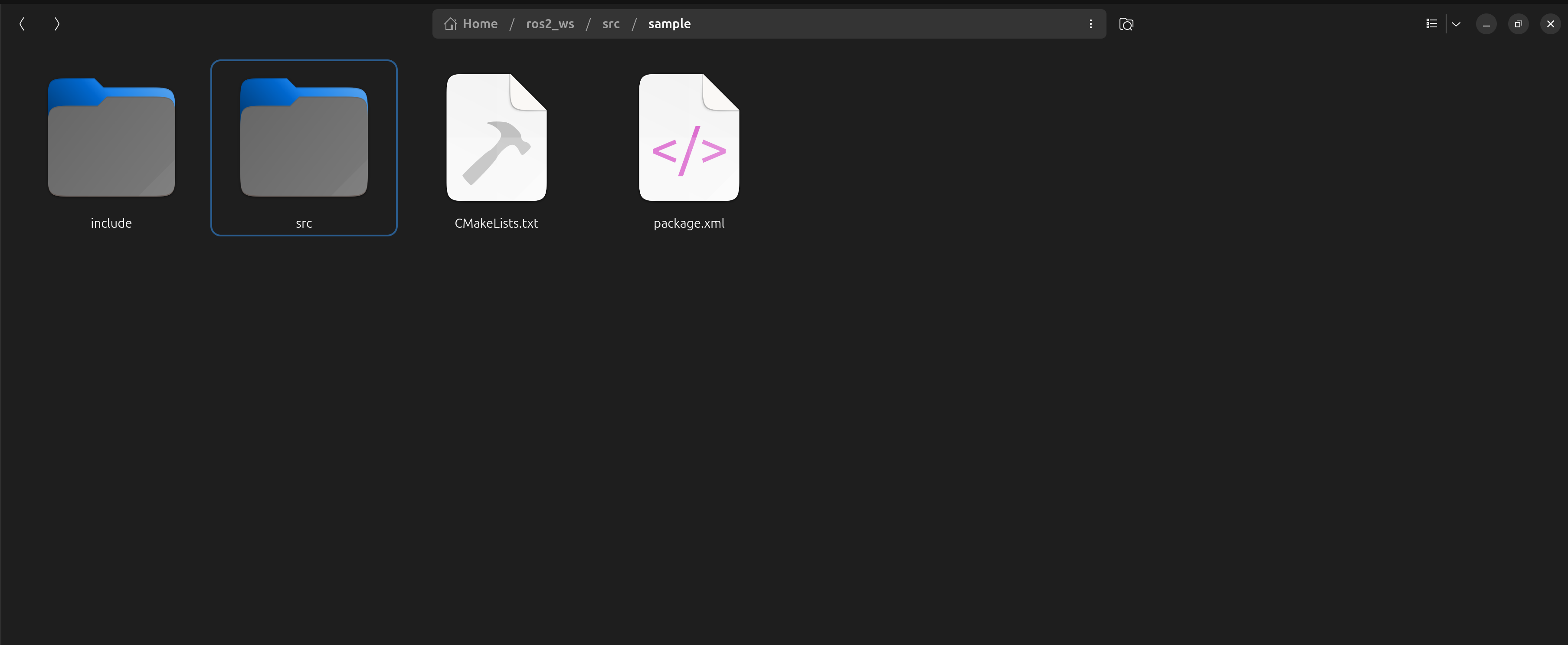
A C++ package is commonly used for high-performance robotic applications. It contains:
- src/ – Source code written in C++.
- CMakeLists.txt – Build configuration file for compiling C++ code.
- package.xml – Metadata and dependency management file.
- launch/ – Optional launch files for starting multiple nodes.
📷 Python Package
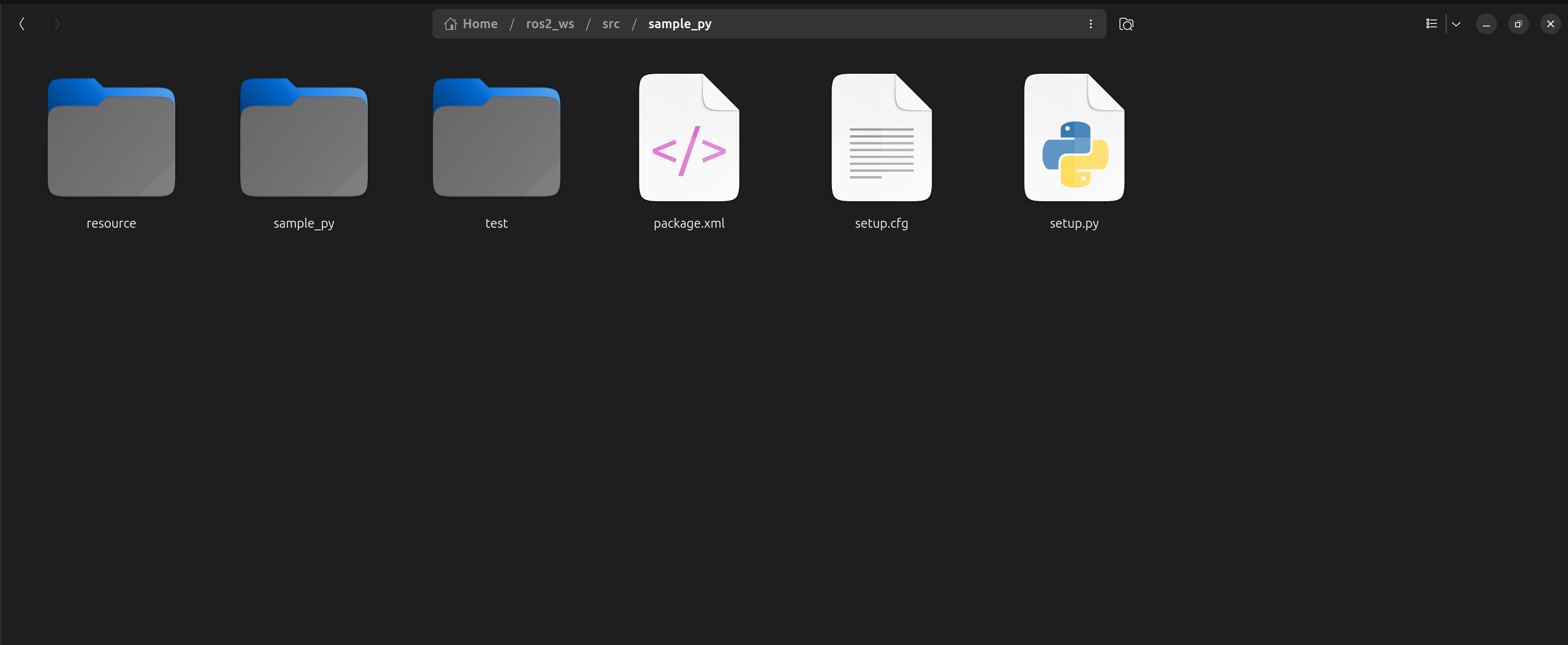
A Python package is ideal for quick development and scripting. It contains:
- src/ – Python scripts for ROS 2 nodes.
- setup.py – Configuration for packaging and installation.
- package.xml – Metadata and dependencies.
- launch/ – Optional launch files.